«Космонавт Елена Серова на МКС успешно проводит эксперимент по съемке земной поверхности „ВИЗИР“, разработанный отечественными специалистами», «Запущена навигационная система RUPARK на крытой парковке ТЦ „Серебряный город“», «Летучие мыши подсказали способ вернуть „зрение“ слепым людям» — всё это заголовки корпоративных новостей на сайте РУКЭП. И еще одна — в январе компания стала резидентом особой экономической зоны «Зеленоград».
На вопросы Zelenograd.ru отвечает генеральный директор компании РУКЭП Александр Калифатиди.

— «РуКэп» занимается разработками в области локального позиционирования и трекинга объектов. Что это такое, в простых словах?
— Начиналось все с геймерства, компьютерных игр: основателю компании Олегу Станиславовичу Рурину пришла в голову идея определять координаты игрока перед монитором и передавать их в приложение, чтобы перерисовывать картинку и использовать это в алгоритмах игры. Вот наш первый трекер, который мы выпускаем — RUCAP UM-5: на голову человека надевается маленькая коробочка с ультразвуковым излучателем, а на монитор — рамка с четырьмя приемниками, они измеряют задержку прохождения сигнала и вычисляют точные трехмерные координаты человека.
Мы изначально хотели, чтобы можно было смотреть в экран как в окно на улицу, повернуть голову и увидеть другой ракурс картинки, «заглянуть за угол» для придания большей реальности участию персонажа в игре. Позже мы делали системы позиционирования и для шлемов виртуальной реальности. Участвовали в выставках вроде «Игромира», в КРИ, Конференции разработчиков игр. Но потом ушли в промышленное применение своих технологий и разработок.
— Свой самый первый трекер для геймеров всё еще поддерживаете?
— Сейчас распродаем последние трекеры, часто их покупают производители каких-то небольших тренажеров. В своё время мы оплачивали разработчикам игр адаптацию этих игр под наш трекер, сейчас около 90 игр поддерживают управление обзором с его помощью, многие из них — это авто- и авиасимуляторы. Но на рынке игровых трекеров тяжело конкурировать с фирмами, которые давно занимаются позиционированием и сделали своё игровое направление, выпускают игры под свои трекеры. Их трекеры, может быть, не обладают такой точностью позиционирования, как наш, но для игр и не нужна хорошая точность.

— Да, ведь кроме игр есть еще и подобные тренажеры — например, по управлению самолетом.
— Именно на игровых выставках нас и заметили разработчики тренажеров и предложили создать систему позиционирования для них. Одна из первых наших систем, и успешная, сделана для вертолетного тренажера Ми-8 — для Авиалесоохраны, пожарных. Этот тренажер представляет из себя полноценный вертолет, который стоит на земле, но кабина его полностью заполнена рабочим оборудованием. Перед вертолётом установлен огромный экран, и восемь проекторов формируют на нём изображение — пилоты из кабины фактически видят только его. На этом тренажере регулярно проходят тренировки экипажей вертолетов со всей России, их обучают навыкам пожаротушения.
В телерепортажах показывают, как это выглядит: летит вертолет, под ним на тросе водосливное устройство, которое летчик из кабины не видит. Управляет им специальный оператор при помощи лебедки, наблюдая за ним через люк в днище грузовой кабины и связываясь с пилотом через переговорное устройство. Он следит за забором воды из естественных водоемов, за сбросом воды — видит, когда вертолет заходит на пожар, как, где и когда сбросить воду. Кнопка управления сбросом воды — у пилота, но команду ему дает оператор. Вот этого оператора надо учить. Невозможно организовать на земле бадью с водой, которая болтается на тридцатиметровом тросе, для этого воспользовались шлемом «виртуальной реальности».
Сам тренажер разработало ЦНТУ «Динамика», известный производитель тренажеров, а мы делали систему позиционирования для головы оператора в этом закрытом шлеме, чтобы система понимала, какую информацию выводить ему на очки: куда он повернул голову, куда передвинулся в кабине. Кроме того, оператор еще должен наблюдать за пожарами через дверь, смотреть, нет ли очагов пожара. Поэтому всю рабочую зону внутри грузовой кабины и снаружи мы оборудовали сетью датчиков позиционирования. Данные о координатах и углах поворота головы передавались в систему, которую разрабатывала «Динамика», и картинка перерисовывалась в очках. Эта была довольно кропотливая работа: картинка должна была совпадать с тактильными ощущениями человека, если он, например, касается рукой стены или дверного проема — мы долго вымеряли всё это вместе с «Динамикой».
— Подобная задача решается и для разных других тренажеров?
— Да, система позиционирования очень часто используется в тренажерах. Мы встраивали её и в авиатренажеры, и в автомобильные тренажеры — везде, где от положения головы человека зависит обзор и надо его сымитировать, нужна такая технология. Занимаясь ею, мы вышли на организацию, которую интересовали похожие задачи для нужд Роскосмоса.
У нас был совместный проект с Московским авиационно-технологическим институтом имени Циолковского (МАТИ), с кафедрой эргономики, которой руководил Игорь Георгиевич Городецкий — известный ученый в этой области. Мы предлагали свою систему позиционирования для нужд эргономики: с её помощью можно было разрабатывать новые кабины самолётов или вертолётов, оптимально располагая все приборы для пилота. Для этого нужно понимать, как он выполняет те или иные стандартные операции — набор высоты, слежение за приборами, как он переводит взгляд, как долго ищет нужный прибор. Всё это можно было определять автоматически с помощью системы позиционирования, тогда как сейчас просто используется видеосъемка, пилоту дают конкретные задания, а потом вручную пытаются обработать результаты. Это отдельная тема, серьезно наш проект не продвинулся, потому что эргономика у нас в стране находится в загоне, но наш подход понравился заказчику.
Они вывели нас на РКК «Энергия», и там мы успешно разработали систему координатной привязки фотоснимков земной поверхности. Это произошло еще в 2012 году, но открытой информация об эксперименте «Визир» становится только сейчас.
Эксперимент «Визир» — фото из космоса
— В чём заключается эксперимент и как он проходит сейчас?
— «Визир» — один из более чем 60 экспериментов, которые сейчас постоянно проводятся на борту МКС. У «Визира» несколько направлений, в их числе — определение географических координат фотоснимков, которые космонавты делают изнутри МКС, через иллюминаторы, обычным ручным фотоаппаратом. Конечно, он очень большой, с 600-800-кратным объективом, фотоаппарат Nikon 3х, сейчас уже используется Nikon 4. На земле один объектив весит 7 с лишним килограмм, но в космосе невесомость, можно обходиться без штатива. Однако, снимать не так просто, земная поверхность проносится мимо иллюминатора со скоростью около 7 километров за одну секунду. Станция всегда обращена одной стороной к Земле, это так называемая надирная сторона, и в этой зоне есть пять иллюминаторов — через них космонавты фотографируют землю, и нужно определить, какую именно местность они сняли. Мы решили эту задачу.
— Задачу, как привязать фотоснимки к координатам?
— Да. Космонавты фотографируют очень много, в день до сотен снимков. Бывает по заданию, бывает, сами видят что-то интересное: извержение вулкана или пожар где-то в лесу, это все из космоса выглядит по-особенному. Но как потом понять, какое место Земли на фотографии? Хорошо, если рядом есть реперные точки, какие-то известные объекты, по которым можно сориентироваться. Но иногда это тундра, лес, открытый океан, где вообще привязаться не к чему…

— А какие масштабы на фотографии получаются?
— Разрешение снимков, в принципе, до двух метров. При съемке стационарными камерами со спутников, чуть ли не номера автомобилей видны, а тут разрешение похуже. Космонавты часто приводят такой пример: танкер идет в открытом море и за ним тянется нефтяной шлейф, потому что, скажем, капитан решил сэкономить и мыть пустые танки не в порту, где это стоит денег, а помыть прямо забортной водой в океане, когда никто не видит — и тогда за судном расползается пятно нефти. Космонавты его фотографируют, а где это произошло, что за танкер? Конечно, координаты станции над земной поверхностью известны, но объектив можно повернуть на плюс-минус 45 градусов, это даст круг земной поверхности диаметром 700-800 километров. А нужно определить точные координаты.
Эту задачу пытались решить в РКК «Энергия» многократно и до нас, один из вариантов — подвешивали под объектив хороший гироскоп, целый блок датчиков, но он давал не абсолютные координаты, а относительные. Его сначала надо было калибровать, наводить на какой-то объект с известными координатами, и некоторое время он позволял точно вычислять координаты относительно этой позиции, а потом погрешность нарастала, и приходилось искать новую точку привязки. Это очень неудобно. Кроме того, этот гироскоп потреблял немало электроэнергии и был опутан проводами питания, от него шел провод и к компьютеру. Это неудобно — когда человек фотографирует, пытается поймать хороший ракурс, а Земля внизу бежит со скоростью 7 километров в секунду, некогда обращать внимание еще и на мешающие провода.
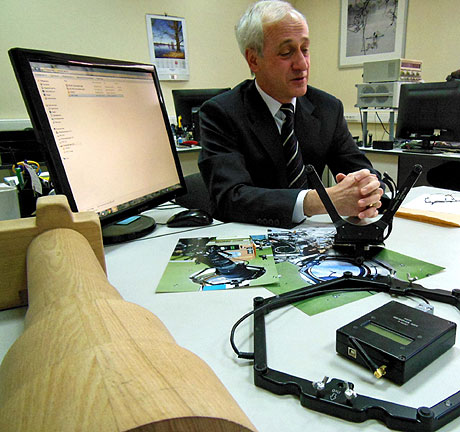
— Как выглядит ваша система?
— Вот она, перед вами. Это рамка, которая жестко устанавливается на иллюминатор, на ней шесть ультразвуковых приемников, а на фотоаппарате три излучателя. Рамка никак не мешает фотографу. А это деревянный макет фотоаппарата, который мы использовали для проверки того, что реальный фотоаппарат не будет мешать передаче ультразвукового сигнала. Дело в том, что ультразвук требует прямой видимости между излучателем и приемником, а огромный объектив может её перекрывать. Нужно было рассчитать оптимальное расположение излучателей, а на рамке разместить избыточное количество приемников, чтобы при любых поворотах фотоаппарата и объектива можно было определить углы разворота оси визирования.

— А для чего нужна съемка именно ручной камерой — на борту МКС нет каких-то стационарных камер с управлением углом поворота через компьютер, например?
— Нет, нужно же поймать правильный ракурс, без человека с этим трудно справиться. Надо отслеживать объект, если он двигается, учитывать наличие облаков и прочее. На самом деле мы предлагали решить задачу автоматической съемки объектов с заданными координатами, но пока в «Энергии» от неё отказались из-за сложности.
— Как удалось состыковать ваши ультразвуковые излучатели с камерой Nikon — или они автономны?
— Платформа с излучателями крепится винтом к штатному разъему для штатива у фотоаппарата, два разъема соединяются с фотовспышкой и входом для дистанционного управления на фотоаппарате. Устройство питается от фотоаппарата, никаких проводов нет, его даже не нужно включать отдельно. Всё сделано по принципу «установил и забыл» — не надо ни калибровать, ни настраивать, ни включать питание. Космонавт пользуется фотоаппаратом, как раньше: включает, ловит нужный объект, фотографирует. В каждый момент фотосъемки автоматически вычисляются координаты и углы разворота оси визирования объектива относительно станции, данные записываются в файл, и потом уже на Земле каждой фотографии присваиваются точные географические координаты, рассчитанные с использованием наших углов и данных о положении станции над земной поверхностью. Таким образом, вместо зоны неопределенности в 800 километров мы получаем точность порядка 0,3-1 градус и зону от 2 до 7 километров. Это очень хорошая точность, чтобы понять, какой участок Земли сфотографирован.
— Вы говорили, что для американских космонавтов тоже разрабатывают подобную систему.
— Да, американцы презентовали проект такой разработки в прошлом году — их система будет работать на другом принципе, на оптике, при этом была заявлена точность определение углов от 5 до 15 градусов, то есть гораздо хуже нашей. О существовании нашей системы они на тот момент не знали. На презентации были специалисты из «Энергии», которые сказали, что мы давно сделали такую систему и с 2012 года её используем.
Свою разработку мы выполнили в 2010—2011 годах, в 2012 году она была доставлена на борт МКС. Космонавты очень довольны этой аппаратурой, Елена Серова хорошо отзывалась о нашем решении еще до полета, во время тренировок на земле. Сейчас мы прорабатываем вариант расширения: космонавты хотят, чтобы оборудование работало на всех иллюминаторах, а также от двух фотоаппаратов одновременно, у разных иллюминаторов. Это не так просто сделать с ультразвуковым сигналом, излучатели разных фотоаппаратов могут мешать друг другу, потому что промодулировать ультразвук не получится. Мы уже утвердили с «Энергией» техническое задание на эту работу, сейчас согласовываем договор.
— Зачем нужны фотографии из космоса с точными координатами? Ну, например, нефтяной танкер увидели — что дальше, отправили фотографии в «Гринпис»?
— Наверное, да. Фотографий используется очень много. Космонавты снимают природные явления: извержение вулкана, для науки — как это происходит, вид сверху; лесные пожары, у которых бывают огромные площади. Какие-то события в городах, стихийные бедствия и многое другое. Просто красивые виды фотографируют, скажем, из Арабских Эмиратов, Абу-Даби — шикарные совершенно снимки, фантастическая архитектура.
Американцы сообщали на презентации, что у них сотни снимков обрабатываются, причем без аппаратуры привязывают к координатам вручную: просто отправляют фотографии на Землю, там сидит группа специалистов, им известны точка над земной поверхностью, в которой была МКС в момент съемки, далее они буквально берут фотоснимок и сличают с помощью подробных карт местности. Производительность такого труда очень низкая, поэтому они и говорили, как это важно — хоть немного сузить масштаб поисков по карте.
Наша система имеет на порядок лучшую точность, чем та, которая прогнозируется у американцев. Кроме того, она позволяет уже сейчас выполнять задачу не только определения координат местности, но и наведения на цель. То есть, решить обратную задачу: когда есть объект, который хочется снять, с Земли даются его координаты…
— И камера сама наводится на объект?
— Её наводит космонавт. Задачу наведения нам не ставили при разработке, но специалисты «Энергии», пользуясь данными об угле наклона камеры, сами создали подпрограмму, которая голосовыми командами (выше, ниже, левее, правее) помогает космонавту навести фотоаппарат на нужную цель. Конечно, это не очень удобно, но, тем не менее, с помощью такой системы уже удалось снять несколько интересных объектов. Та же Елена Серова об этом писала. Мы сейчас хотим сделать в новой модификации систему наведения уже не голосом, а с помощью прицельного индикатора. Ну, как будто вы целитесь из ружья куда-то.
— Фоторужье для космонавтов? :)
— Вроде того. Такие разработки достаточно растянуты по времени. Сначала делается макетный образец, на это нужен где-то год. Его испытывают на Земле, проверяются все характеристики, исправляются ошибки, потом делается опытный образец — еще год, — на котором проводятся испытания, можно ли его использовать в космосе. Его проверяют на электромагнитную совместимость, на перегрев, на газовыделение, ведь в космосе важен материал, из которого сделано оборудование — это здесь мы открыли форточку и проветрили, а у космонавтов такой возможности нет. И пожаробезопасность очень важна, причем не просто чтобы материал был негорюч, но даже чтобы он не выделял вредных веществ, если вдруг что-то рядом загорелось. Если все эти испытания проходят положительно, изготавливаются летные образцы.

— А фотоаппарат Nikon специально делали для космических целей?
— Нет, конечно, но его сертифицируют для применения на МКС, проводят различные испытания: на электромагнитную совместимость, на газовыделение, на пожаробезопасность
— Для вашей системы позиционирования космическая фотосъемка — тоже один частный случай применения?
— Да, модификации UМ-16 для вертолетных, авиационных тренажеров и для МКС мало чем отличаются друг от друга по технологии, только конструктивом. Сейчас у нас прорабатывается один из проектов UМ-16 для атомной станции: там есть огромные цистерны разного назначения, у которых надо проверять качество сварных швов; есть устройства, которые занимаются этим неразрушающим контролем — это сканеры на магнитных колесах, они присасываются к цистерне и ползают по ней, ими управляют с земли; но надо фиксировать, в каком месте это устройство обнаружило трещину или течь, чтобы дальше этим занималась ремонтная бригада.
Город глазами летучих мышей
— Разработки для людей с ограниченными возможностями, для слепых — у вас заявлено и такое направление. Тоже на базе ультразвука?
— Да, это устройство «Эхо Сонар». В большинстве наших разработок ультразвуковая технология есть в том или ином виде. Прототип «Эхо Сонара» мы сделали из обычного велосипедного шлема: в центре, надо лбом, ультразвуковой излучатель, по бокам два ультразвуковых приемника. Функционально он рабочий, но внешний вид, конечно, должен быть другим. Сейчас ищем финансирование, чтобы довести это изделие до готовности. Мы обращались в разные организации, но, к сожалению, Всероссийская организация слепых не располагает такими средствами. Есть госпрограмма «Доступная среда» с бюджетным финансированием, она существует давно, но туда не так просто попасть. Да и подобных разработок в ней не предусмотрено.
— Это та самая программа, по которой в Москве появились желтые полосы и рубцы на асфальте?
— Да, в ней есть и система «Говорящий город» с радиомаяками, которые информируют слепых о каких-то социально значимых объектах. На груди у слепого висит абонентское устройство (оповещатель), и когда он подходит, скажем, к библиотеке, входит в зону действия радиомаяка, установленного над входом, — он слышит в наушниках информацию об этом объекте, но не понимает, где именно этот объект находится. Тогда слепой нажимает на оповещателе кнопку, идёт связь по радиоканалу и на библиотеке гудит звуковой сигнал, чтобы он сориентировался, куда идти. Неудобство состоит в том, что этот звуковой сигнал слышат и все остальные прохожие. Кроме того, что делать, если доступны сразу несколько объектов, скажем, помещение с несколькими кабинетами, и нужно найти какой-то один?
— Да и до библиотеки еще нужно как-то дойти по городу…
— Подразумевается, что слепой примерно знает район, ведь они как-то ходят по городу, ориентируются. Кстати, они пользуются и GPS-навигаторами для слепых, особенно молодые люди — есть специальные программы для смартфонов. Наш «Эхо Сонар» предназначен для локации в ближней зоне. Принцип работы — как ультразвук у летучих мышей: они в абсолютной темноте способны «видеть» своих собратьев и не сталкиваться с ними, летать по пещерам или между деревьями, ловить мошек, тоже как-то их определяя. И всё это с помощью ультразвука, который летучая мышь сама излучает, принимает отраженный сигнал, и по его характеру ориентируется. Очевидно, он окрашен по-разному при отражении от разных предметов и поверхностей. Мы можем это только предполагать, а мышь прекрасно обрабатывает эту информацию на уровне подсознания. И вот мы хотим дать подобный инструмент слепым, чтобы они имели звуковую окраску окружающей среды.
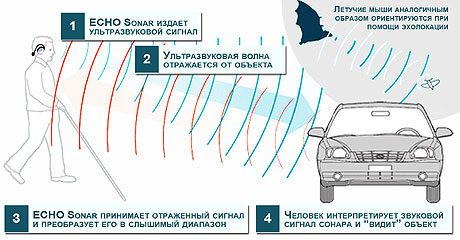
— А с какой точностью можно интерпретировать отраженный ультразвук для человека?
— Для повышения точности детекции объектов нужна практика. Мы сделали тот же ультразвуковой механизм, излучатель и приемники, но человек не слышит ультразвуковые колебания — их частота 40 килогерц; человек слышит до 10 килогерц, поэтому мы оцифровываем и переводим отраженный сигнал в звуковой диапазон, сохраняя форму огибающей. В огибающей сигнала как раз и скрыт характер объекта, от которого это отражение произошло. Эти звуки, с сохранением формы, но преобразованные, мы выводим в небольшие динамики, расположенные над ушами — получается стерео-звучание: сигнал от правого приемника идет на правое ухо, от левого — на левое. Планируем все это сделать в виде наушников.
— Вы испытывали шлем в реальных условиях?
— Да, мы начинали в Казани, там есть интернат для слепых и слабовидящих детей, и часть преподавателей там тоже слепые — они и испытывали «Эхо Сонар». Это были два молодых человека 25-30 лет, семейные люди, которые жили нормальной жизнью и работали. Шлемы им, конечно, не очень понравились — «Ходим по городу как космонавты какие-то». Но при наших скромных средствах мы должны были оценить возможности своей разработки, понять, действительно ли она поможет слепому, и тогда уже искать финансирование на разработку подходящей конструкции.
Шлем работает где-то на 3-4 метра, в ближней зоне. Когда человек идет по улице, он может «увидеть», например, столб. Конечно, наш прибор не отменяет трость — ультразвук не поможет понять, что впереди лужа или грязь, насколько эта лужа глубокая. Но можно «увидеть» любое препятствие, от которого он отражается: стул, стол, столб, какой-то уступ. Ребята в Казани после двух месяцев тренировок были способны точно определить бордюрный камень, еще до зоны действия трости. Мы проводили эксперименты: в спортивном зале ставили низкий журнальный стол и просили их определить вид препятствия, они подходили, начинали крутить головой (в шлеме) и показывали габариты стола с точностью до 10 сантиметров. Или им предлагалось обойти по периметру здание сложной конфигурации, пользуясь только ультразвуком — и они двигались на расстоянии полуметра-метра от стены, хорошо распознавали повороты.
— Самим испытателям понравились возможности «Эхо Сонара»?
— Мы пытались понять, какие препятствия для них наиболее неприятны. Например, у себя дома человек все изучил, знает, где что находится, и дорогу на работу уже проложил не один раз, ориентируется. Оказалось, что очень большая неприятность — это машины, которые припаркованы где попало, как попало и каждый раз по-разному. Особенно большие грузовики. Слепой палочкой чувствует колесо, а дальше палка уходит в пустоту между колесами, значит, можно идти. Ребята говорили, что часто бьются лбом о борт машин…
— Ваша система может работать вместе с GPS и смартфоном?
— Да, у нас даже есть своя концепция «Эхо Сити», там кроме устройства «Эхо Сонар», действующего в ближней зоне, предусмотрена локация в средней зоне и глобальная навигация. Для средней дальности мы предлагаем использовать инфракрасные (ИК) маяки — вместо радиомаяков, как в «Говорящем городе». Большое преимущество ИК-маяка в том, что, в отличии от радиомаяка, у него диаграмма направленности может быть сформирована какая угодно. Можно сделать, чтобы этот ИК маяк «освещал» только то направление, по которому можно к нему подойти. Самый простой пример — пешеходный переход, по которому слепому нужно перейти дорогу, не заходя на опасную часть. В случае с радиомаяком это невозможно, у него практически круговая диаграмма направленности.
ИК-канал мы планируем встроить в тот же шлем или в наушники. ИК-приемники малогабаритные, если их расположить над каждым ухом, то, поворачивая голову, человек сможет понять, откуда идет сигнал. ИК-сигнал будет передавать голосовое сообщение, так же, как в ИК-наушниках при передаче звука. Никакого ноу-хау здесь нет, это все известно, просто выбор другой технологии для маяков.
А для больших дистанций — GPS навигация. Тут мы тоже ничего изобретать не собираемся, просто сделать Bluetooth-модуль, который будет обеспечивать связь со смартфоном, чтобы передавать информацию с GPS-навигатора.
— И GPS-навигатор будет просто рассказывать человеку, как и куда идти, подобно автомобильному навигатору?
— Да. Получается вот такое универсальное устройство, которое будет работать и на ближних расстояниях, и на средних, и на дальних. Причем можно будет использовать только некоторые из этих каналов, например, только ближнюю локацию, если у человека нет смартфона с GPS-навигатором или в его городе пока не установлены ИК-маяки.

— Подобные системы на ультразвуке для слепых существуют?
— Мы не встречали, хотя и занимаемся этой темой с 2011 года. В этом году появилась статья, студенты-американцы сделали что-то подобное, причем именно в виде шлема на голову.
— Сколько это может стоить? Коммерческая реализация для слепых представляет интерес?
— По нашей оценке, цена «Эхо Сонара» будет порядка 10 тысяч рублей или меньше, когда он уже будет в виде наушников. Но на подготовку производства нужно порядка 10-15 миллионов: разработать корпус, изготовить корпусные детали, доработать софт
Браслет-стрессометр
— РУКЭП помимо готовых проектов предлагает еще и услуги разработчика, R&D. Есть такие примеры?
— Один из наших новых проектов — устройство мониторинга физиологического состояния человека в виде браслета на руку. Мы занялись им по инициативе одного из наших партнёров: у него есть знакомые медики, которые хотели бы сделать прибор для измерения стресса, и он предложил нам разработать схемотехнику и конструкцию такого прибора при условии, что вся методология расчетов будет обеспечена. Сейчас мы уже сделали первые корпусные детали и будем их дорабатывать — слишком мягкий ремешок, рвется, надо пожестче.

— Это аналог спортивных браслетов, которые сейчас так популярны?
— Его можно использовать по-разному. Набор датчиков позволяет измерять частоту сердечных сокращений, и не просто измерять, но и снимать фотоплетизмограмму — график колебаний пульсовой волны. По этому графику врач может определить некоторые хронические заболевания, они сразу видны. Изначально планировалось, что это будет вспомогательное устройство, которое будет сообщать человеку о каких-то возможных заболеваниях, чтобы с этим он уже шел к врачу.
Одна из основных функций прибора — измерение уровня стресса, в этом его отличие от большинства похожих браслетов, которые сейчас выпускаются. На самом деле измерение уровня стресса — это просто алгоритм измерений по тем же датчикам: есть частота сердечных сокращений, есть кожно-гальваническая реакция, сопротивление кожи человека — эти данные используются в разных приборах, в том числе в детекторах лжи.
— Ваш браслет-стрессометр можно использовать и как детектор лжи? :)
— По сути, это то же самое, но такой цели мы не преследовали. Просто когда человек волнуется, у него происходит изменение кожного сопротивления, и мы используем его как один из факторов. Есть формулы для расчета стресса, есть ученые-медики, которые давно этим занимаются. Мы схемотехники, наша задача — получить исходные данные для формулы расчета стресса. Человек не всегда понимает, что начинает впадать в опасное стрессовое состояние, и наш прибор будет ему напоминать об этом.
Впрочем, при помощи его сенсоров, а тут еще и акселерометр есть, можно использовать браслет как шагомер, измерять физическую активность человека, использовать и для фитнеса, и для спортсменов. Но для начала надо добиться, чтобы он точно, постоянно и регулярно измерял нужные параметры в разных условиях. Одно дело — посадить человека, надеть ему браслет и всё измерить. Совсем другое дело — сделать это на ходу, когда человек бежит. Или как различить, когда он вспотел от какого-то переживания или просто попал под дождь? Много таких вопросов.
— Сколько может стоить такой браслет? В магазинах бытовой электроники широкий разброс цен на подобные устройства.
— Мы хотим, чтобы он стоил 6-7 тысяч рублей. Браслеты бывают разные, могу показать пару образцов: вот эти стоили в прошлом году порядка 9-10 тысяч рублей, тут есть часы, много функций — измеряется и кожно-гальваническая реакция, и частота сердечных сокращений, причем на ходу. У многих производителей есть подобные браслетики, в которых стоит только акселерометр, а пытаются и показывать активность, и рассчитывать калории… Мы бы не хотели уходить в такую недостоверную область — считать калории, хотя, бывает, нам звонят и спрашивают: «А у вас эта функция будет»? Это все на самом деле очень непросто.
— Так или иначе, вы сразу попадаете в зону большой конкуренции с таким устройством.
— Вы правы, конкуренция очень большая, причем все фирмы расхваливают и описывают фантастические возможности своих приборов. Люди на это ведутся. А если человек один раз купил браслет и понял, что его обманули, то во второй раз он вообще не будет покупать такое изделие.
Деньги, импорт и история
— Недавно компания РУКЭП стала резидентом особой зоны «Зеленоград», какие плюсы в этом статусе?
— В основном это налоговые льготы: социальные выплаты меньше — до 2018 года 14% вместо 30%. Затем они будут увеличиваться до 28%, но все равно это существенная помощь. Мы, честно говоря, давно хотели туда попасть, но были разные ограничения — надо было строить свое здание, вкладываться в капитальное строительство. Раньше это было одним из условий. Как только появилась возможность просто стать резидентом-арендатором, мы тут же подали заявку. Помимо налоговых льгот для нас есть и другой большой плюс: ОЭЗ проводит всевозможные выставки, конференции, и мы уже участвовали в нескольких.
— С каким из своих проектов вы пришли в ОЭЗ?
— Собственно, мы заявляли все текущие проекты, которыми занимаемся: и «Эхо Сонар», и прибор для мониторинга физиологического состояния человека, и ультразвуковую систему позиционирования UМ-16, и автоматизированную систему для парковок «RUPARK».
— Вы говорили о поисках инвесторов и финансирования — а в Сколково нет подходящего для вас направления?
— В Сколково обращались, получили вежливый отказ. Честно говоря, Сколково мне не очень нравится — я работаю в Зеленограде с института, мы здесь с самого начала поднимали электронику, а там молодые «эффективные менеджеры»… Я был на нескольких заседаниях, у них подход такой: эта разработка выше зарубежного уровня? А как она может быть выше, когда у нас пару десятилетий электроника была в полной разрухе? Какие-то отдельные разработки, конечно, есть, но все равно на импортной элементной базе… Из Зеленограда выступал человек, кажется, с «Микрона», рассказывал, как они пытаются наладить производство — ему сразу вопрос: «Это будет выше мирового уровня? Нет? Нам это неинтересно». Так можно поддерживать только шарлатанов, которые пообещают «Да, я сделаю в три раза выше», получат финансирование, благополучно его проедят и скажут: «Ну, не получилось».
Мне кажется, нужно продолжать развивать Зеленоград, где есть предприятия бывшей электронной промышленности, где есть МИЭТ, который готовит кадры. Кадры в электронике сейчас большая проблема, есть такая оценка, что в ближайшее время нужно будет 800 тысяч специалистов. Где их взять? Ведь сейчас немногие выпускники МИЭТа, даже те, кто окончил технические направления, работают по специальности.
— У вас есть такая необходимость, вы ищете себе специалистов?
— Пока мы справляемся существующим коллективом. На самом деле все зависит от объема задач. Наше сотрудничество с «Энергией» сейчас продвигается, они предлагают все новые и новые идеи, и мы пытаемся их реализовывать. Вполне возможно, что в ближайшем будущем мы будем расширяться. Хотя есть проблемы с финансированием и с администрированием этих работ.
— А элементная база — для ваших космических разработок нужна отечественная?
— Конечно, она всегда была нужна. Но всеми правдами и неправдами разработчики старались использовать импортную, потому что там ассортимент больше, а если все переводить на отечественную, будут совсем другие габариты и потребляемая мощность. Однако, буквально за несколько последних лет появились отечественные дизайн-центры, которые разрабатывают микросхемы, их с некоторой натяжкой можно считать отечественными. Например, зеленоградский «Миландр» сделал ряд интересных микросхем, и, в принципе, теперь можно пробовать использовать их.
— А ультразвуковые датчики делают в России?
— Ультразвуковые датчики все пьезокерамические. В Зеленограде есть фирма, которая серьезно занимается пьезокерамикой, у них большой ассортимент пьезокерамических изделий. Были и нужные нам датчики, но, к сожалению, спроса на них не было, и сейчас это направление может реанимировать только под большой заказ. Мы не можем такой заказ обеспечить, у нас на комплект оборудования нужно всего 9 датчиков. Поэтому вроде и есть такая возможность — производить и покупать датчики в России, и в то же время мы вынуждены покупать импортные, потому что они всегда есть в продаже.
— Ваша предыстория в Зеленограде — какой она была, ведь вы всю жизнь в зеленоградской электронике?
— Я закончил МИЭТ, работал по специальности в НПО «ЭЛАС», который возглавлял Геннадий Яковлевич Гуськов, в его головном институте НИИ микроприборов. Тогда там несколько тысяч человек занимались в основном разработкой изделий для космоса. Оборудование производили в основном на зеленоградском заводе «Компонент», были еще заводы в Конаково и Солнечногорске. Мы делали аппаратуру для вычислительных комплексов, которые стояли на прежних наших космических станциях — «Салют-7», «Мир». А потом в 90-е годы все это рухнуло.
Одно время я работал на «Элпе», занимался интересным направлением — высоковольтными преобразователями напряжения на базе пьезокерамических трансформаторов. Потом, как главный конструктор, вёл разработки ряда приборов. Одним из первых был бета-гамма радиометр. Когда случилась авария в Чернобыле, появился большой спрос на них, было выпущено несколько устройств для ширпотреба, а мы хотели создать портативный профессиональный прибор. И сделали его, он даже прошел испытания во ВНИИФТРИ в Менделеево и был внесен в госреестр средств измерения. Изделие делалось конгломератом из пяти фирм: головной была «Элпа», калужский «Восход» делал процессоры — тогда, в конце 80-х, мало кто был способен их делать; на Украине, в Харькове была фирма «Юникс», она делала пресс-формы и корпусные детали, участвовали также зеленоградский «Зенит» и НИИЦ РБ КО, на базе которого шли испытания. Когда СССР развалился, все разбежались. Где Украина, где корпусные детали…
— Как вы оцениваете нынешние попытки реанимировать отрасль электроники под лозунгами импортозамещения? До уровня СССР, конечно, далеко, но какая-то тенденция появилась?
— Часть аппаратуры, особенно военную и специального назначения, Россия продолжает разрабатывать сама. Но разработчики уже давно привыкли пользоваться импортной элементной базой, опять же, к сожалению, не так много средств отводится на развитие собственной ЭКБ. Все фирмы, которые пытаются делать отечественную базу, тот же «Миландр» или аналогичные, по-моему, не имеют прямого госфинансирования. Они имеют заказы от предприятий, которые могут быть государственными. Конечно, сказать, что все совсем плохо, нельзя. Я слежу за ассортиментом отечественной микроэлектроники, он маловат, конечно, чтобы широко им пользоваться, на современное изделие чаще всего не наберешь. Тот же наш браслет, например — ну нет отечественных аналогов нужных микросхем.
— С импортозамещением вы связываете какие-то серьезные надежды?
— Конечно. Мы сейчас обсуждаем новые заказы, и такие серьезные заказчики, как Роскосмос или Министерство обороны, ставят обязательное условие — использование отечественной элементной базы. Это в принципе правильно. Нельзя зависеть, особенно в таких серьезных разработках, от поставок импортных элементов.
Хотя, смотря что понимать под импортом. Если это импорт из США, из Германии, где нам в любой момент могут «перекрыть кислород» — это одно. Но есть аналоги этих микросхем, которые делают в Корее, в Малайзии, в Тайване, в Китае. Там, по-моему, никаких санкций к нам не собираются применять, вполне можно пользоваться их элементной базой, сертифицировать, доводить до нужных кондиций, если она по каким-то параметрам не устраивает. Сразу отечественная база не появится из ничего, поэтому импортозамещение нужно проводить постепенно, учитывая существующее положение.
Елена Панасенко